
邁步機器人聯合多家高校、三甲醫院發表SCI頂級期刊論文,產品有效性獲充分驗證
邁步機器人近三年已于國際TOP期刊發表論文近20篇,近日,再次與清華大學、武漢大學、南京醫科大學第一附屬醫院、深圳市第二人民醫院、山東大學齊魯醫院等多家知名高校、醫院聯合在SCI TOP期刊發表兩篇高水平學術論文,充分驗證了邁步機器人團隊研發的下肢外骨骼機器人H系列產品的有效性。
邁步機器人與清華大學具有豐富的前期研究合作基礎,包括:共同從事醫療機器人研究、發表學術論文,共同開展國家自然科學基金項目等。此次密切合作,以邁步機器人產品康復下肢外骨骼機器人(BEAR-H)為依托,以南京醫科大學第一附屬醫院、深圳市第二人民醫院為試驗基地,通過產學研用的合作方式對新型智能康復下肢外骨骼機器人(BEAR-H)的有效性進行了驗證,在SCI期刊IEEE ROBOTICS & AUTOMATION MAGAZINE發表題為BEAR H: An Intelligent Bilateral Exoskeletal Assistive Robot for Smart Rehabilitation的學術文章。
IEEE ROBOTICS & AUTOMATION MAGAZINE期刊是機器人學、自動化與控制系統行業的權威刊物,JCR一區。本篇論文作者包括清華大學李翔教授、南京醫科大學第一附屬醫院勵建安院士、深圳大學第一附屬醫院龍建軍主任、邁步機器人CEO陳功和CTO葉晶。
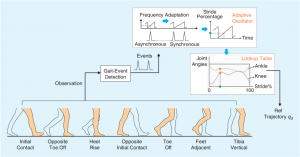
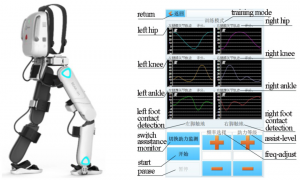
文章介紹了由邁步機器人研發的新型智能康復下肢外骨骼機器人(BEAR-H),其主要創新之處在于采用柔性驅動器及自適應阻抗控制,集成步態識別、個性化軌跡生成和同步云計算診斷等多種智能功能。BEAR-H已開展30例患者臨床試驗,通過評估訓練效果并從研究中得到驗證,患者在使用該款下肢康復外骨骼機器人訓練后下肢運動功能得到明顯改善。
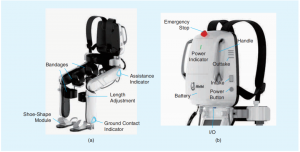
與其他康復機器人相比,BEAR-H具有以下特點:
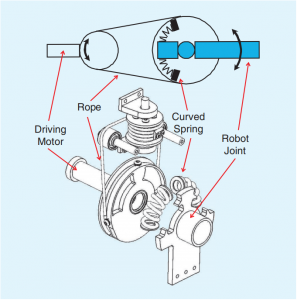
(1)相比傳統剛性驅動器,柔性驅動器在力控制、阻抗控制等人機交互應用中具有極高的穩定性和力反饋精度,不需增加額外的力/力矩傳感器即可得到力反饋,最大限度的保證使用安全。
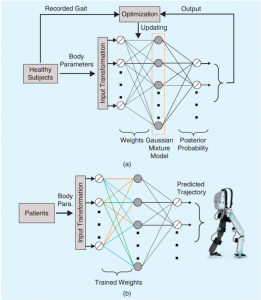
(2)提出個性化軌跡生成方案,通過機器學習方式建立患者身體參數到下肢行走軌跡的深度網絡,定制行走軌跡為患者提供更為貼合的個性化助力方案在不確定的動態情況下調節相互作用力矩和關節角度之間的關系,阻抗模型的實現也提供了一定程度的自由移動空間,因此適合根據需要進行協助的康復范式。
(3)建立云端管理平臺,允許醫生和家屬監控康復進展,訪問帶有歷史數據的個性化文件,快速了解整個訓練過程。

勵建安教授團隊
南京醫科大學第一附屬醫院勵建安教授(中國康復醫學第一人)是美國醫學科學院國際院士,現任亞洲與大洋洲康復醫學會副主席。勵教授帶領的團隊曾開展國內步態分析的臨床應用。在健康中國的大局下,近年來還積極參與推動體醫融合、康養融合、大數據-人工智能與主動健康、康復機器人和智能輔具、腫瘤康復、心肺康復等。
李翔教授團隊
清華大學自動化系李翔教授團隊依托于國家CIMS工程技術研究中心,長期從事面向復雜系統控制與優化的進化計算、深度神經網絡、多智能體與網絡控制等各智能方法研究,在智能醫療機器人、深海特種機器人、重載列車協同控制、智能制造工廠等多種大型裝備與系統領域承擔國家重點專項、國家自然科學基金重點項目,獲國家科技進步二等獎等獎勵。
邁步機器人團隊
邁步機器人團隊是由陳功、葉晶等多位海歸博士和資深機器人行業從業者組成,具有深厚的技術積累和國際化的視野,在機器人領域擁有世界頂尖的技術水平,堅持自主創新,具有強大的研發能力和創新理念。圍繞其核心技術–基于柔性驅動器的機器人交互技術,研發了包括下肢康復外骨骼機器人在內的數款醫療康復機器人產品,通過精確穩定的力控制實現了患者-機器人協作的主動訓練模式,極大提升康復訓練的效果。自公司成立以來,共完成五輪融資,融資額逾億元,獲得了資本市場的強力支持,引入了包括聯想創投、分享投資、威高集團、四環醫藥等知名投資機構。
此外,邁步機器人與武漢大學通力合作,在山東大學齊魯醫院、南京醫科大學第一附屬醫院等多家機構開展了“采用個性化步態的康復機器人對偏癱患者步態訓練影響”的研究,在SCI期刊Frontiers in Neurorobotics發表題為Effects of Individualized Gait Rehabilitation Robotics for Gait Training on Hemiplegic Patients: Before-After Study in the Same Person的學術文章。
Frontiers in Neurorobotics期刊重點關注機器人學、人工智能、神經科學行業,JCR二區。武漢大學郭朝教授為第一作者,邁步機器人CEO陳功和CTO葉晶為主要貢獻者。
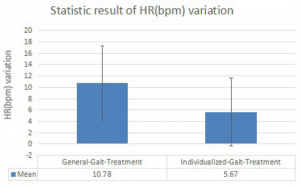
下肢外骨骼機器人正廣泛用于中風患者的步態康復訓練。然而,目前大多數康復機器人都是由預定的步態軌跡進行訓練,這往往與特定患者的實際步態軌跡不同。因此,文章旨在探討根據患者身體參數生成的個性化步態對使用下肢外骨骼機器人的偏癱患者步態康復訓練過程中能量消耗情況的影響,從而驗證個性化步態軌跡對提升康復訓練效率的有效性。

組間比較表明,通過個性化步態康復訓練可以提高腦卒中偏癱患者的訓練效率。

武漢大學郭朝教授團隊在康復機器人與臨床康復等方面進行了長期深入的理論研究與臨床實踐。團隊多年來一直從事外骨骼機器人、人工智能技術、康復醫學等方面研究,在柔性驅動器仿生設計與控制、外骨骼機器人設計與控制、人體下肢步態相位檢測、模仿學習與人機協作控制等方面取得了較好的研究成果。
山東大學齊魯醫院張志勉教授團隊積極開展了長達近三十年的老年心腦血管疾病的篩查、診療和康復的臨床與基礎研究,先后獲批國家級、省部級、廳局級課題十余項,科研成果獲得山東省科技進步二等獎、山東省科技創新成果獎二等獎等廳級局以上獎勵近十項,被評為全國健康管理示范基地,并獲得山東省“巾幗文明崗”、“青年文明號”、“山東省城鄉婦女崗位建功先進集體”等榮譽稱號。
目前,在康復機器人領域,國際巨頭已經在柔性可穿戴醫療器械的創新和產業化方面走在了世界的前沿,我國大部分生產康復機器人的企業都停留在框架訓練型機器人階段,在動力柔性化、數據智能化等多個核心技術方面無法突破。
邁步機器人公司一直專注康復機器人的研發,此次發表的兩篇高水平論文代表著團隊在機器人領域頂尖的技術水平,具有強大的研發能力和創新理念。邁步機器人基于柔性驅動器的機器人核心技術,研發了數款外骨骼機器人,結合人體工程學,為柔性康復機器人領域的建立與發展提供先進的技術儲備,并培育和促進全國康復機器人產業的發展。
邁步機器人團隊已在醫療康復機器人領域申請國內外專利近兩百項,已授權一百余項。目前,主要認證及榮譽:2017、2018年獲得清科 Venture 50(中國最具投資價值企業50強)稱號,2018年獲得深圳明日之星稱號,2018年獲得粵港澳大灣區人工智能百強企業稱號,2020年獲得最具投資價值醫療科技企業TOP10稱號,2021年獲得廣東省柔性可穿戴康復機器人工程技術研究中心認定等。

邁步機器人還在加緊布局智能康復體系的建設,通過研發生產多種類型的外骨骼機器人,讓機器人輔助的康復訓練涵蓋多個方面,并借助大數據與人工智能逐步建立與臨床評價相對應的機器人評價體系,最終實現個性化、精準化、智能化康復訓練,以應對我國加速到來的老齡化社會。
Comments are closed.